En aquest projecte us volem mostrar com adaptar un Bleubot per fer-lo accesible a tothom. sabem que els petits botons que porta el dispositiu no poden ser utilitzats per alguns nens degut a la seva mida i la proximitat entre ells. Es per aquest motiu que hem creat una adaptació amb botons plans, grans i senzills. Fàcil de replicar. Connexió d’una ESP32 amb botons Touch Pin amb un BlueBot via BLW.
Aquestes informacions es complementen amb la Guia simplificada de creació: link
Bluebot

Què és un Bluebot?
- Descripció: El Bluebot és un robot educatiu dissenyat per ensenyar conceptes bàsics de programació i robòtica. Es controla a través d’una aplicació mitjançant Bluetooth.
- Aplicació en l’educació: S’utilitza en activitats per ensenyar programació i lògica, especialment en entorns educatius on els nens interactuen amb el robot mitjançant ordres senzilles.
Què és una ESP32?

- Descripció: L’ESP32 és una placa de desenvolupament que integra Wi-Fi i Bluetooth (incloent-hi BLE). És ideal per a projectes d’IoT i automatització gràcies a la seva versatilitat i baix cost.
- Aplicació en aquest projecte: L’ESP32 es farà servir per comunicar-se amb el Bluebot a través de BLE, i els botons externs estaran connectats als pins tàctils de la placa per controlar el robot.
Donat que hi ha moltes ESP32, us deixem la que nosaltres hem utilitzat: Placa de desarrollo de módulo inalámbrico para WeMos Mini D1, LOLIN32, ESP32, Wifi, Bluetooth, CP2104, ESP-WROOM-32, CPU de doble núcleo, 4MB, Flash
Hem escollit aquesta donat que te possibilitat de connectar una pila d’alimentació

Pins tàctils (Touch Pins)
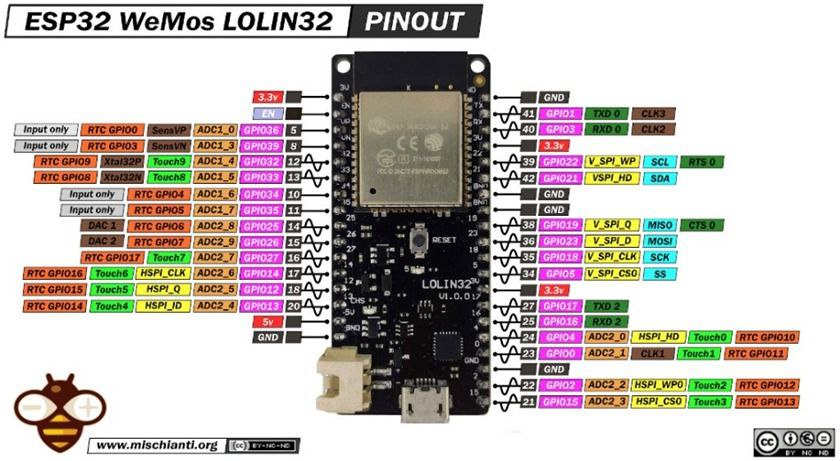
- Descripció: Els pins tàctils de l’ESP32 poden detectar la capacitància (el toc) sense necessitat de botons físics, cosa que simplifica la interfície.
- Ús en aquest projecte: Els pins tàctils permeten crear una interfície de control accessible per als nens, sense necessitat de botons mecànics.
A l’imatge superior es poden trobar els Touc Pin, color verd.
Implementació amb Touch Pins de l’ESP32
- Simplicitat del circuit: Els Touch Pins de l’ESP32 permeten crear botons capacitius sense components addicionals, simplificant el disseny.
- Flexibilitat de disseny: Es poden utilitzar diferents materials conductors (metall, pintura conductiva, etc.) per crear superfícies tàctils personalitzades.
- Múltiples punts de contacte: L’ESP32 ofereix diversos Touch Pins, permetent crear interfaces amb múltiples punts d’interacció.
Botons a la part superior del Bluebot

- Botons de direcció: El Bluebot disposa de botons per controlar els moviments del robot, que són:
- Endavant (↑)
- Enrere (↓)
- Girar a l’esquerra (←)
- Girar a la dreta (→)
- Botó de “Go”: Aquest botó inicia l’execució dels moviments que prèviament s’han programat.
- Botó d’esborrar (X): Es fa servir per esborrar la seqüència de moviments o instruccions programades prèviament.
- Botó de pausa: Permet interrompre momentàniament l’execució del programa o seqüència que s’està executant.
Aquests botons són els que permeten als usuaris programar una seqüència d’instruccions directament des del robot, sense necessitat d’una aplicació externa. En el nostre projecte eliminen la sequenciació, conforme es prem una tecla l’ordre passa directament al dispositiu i no s’acumulen. Acció-reacció directa.
Botons a la part inferior del Bluebot
- 1. Activar el so
2. Encès/Apagat
3. Bluetooth - A la part inferior del Bluebot, normalment no hi ha botons interactius de control per als usuaris, però hi ha components com el botó d’encès/apagat, així com l’accés al compartiment de les bateries. Això facilita el manteniment, permetent que es recarregui o canviï la font d’alimentació.
- El botó d’encès/apagat és petit i està pensat per fer funcionar el robot, però no està dissenyat per una interacció constant com els botons de la part superior. També és aquí on es troba el sensor de llum, que s’utilitza en alguns exercicis de programació amb el Bluebot per detectar la llum ambiental.
Botons Tàctils
Els botons tàctils són molt senzills de fer. Necessitarem Una mica de paper d’alumni, un fil per cada botó, peces de plàstic (es pot escollir rígid o enrotllable) i/o fundes de plastificar.
L’ordre del component, en nivell de capes, és: base de plàstic, per sobre una peça de paper d’alumini amb el cable enganxat, sobre aquest paper d’alumini s’ha de posar el pictograma o dibuix; finalmente i per sobre de tot, una peça més de plàctic transparent (tipus tapa de plàstic de dossiers).
Aqui podeu vure una manera molt senzilla de crear botons plans amb una base de cartró, paper de cuina, uns cables, una peça de paper amb el dibuix de les fletxes i finalment folrat amb arion-fix.

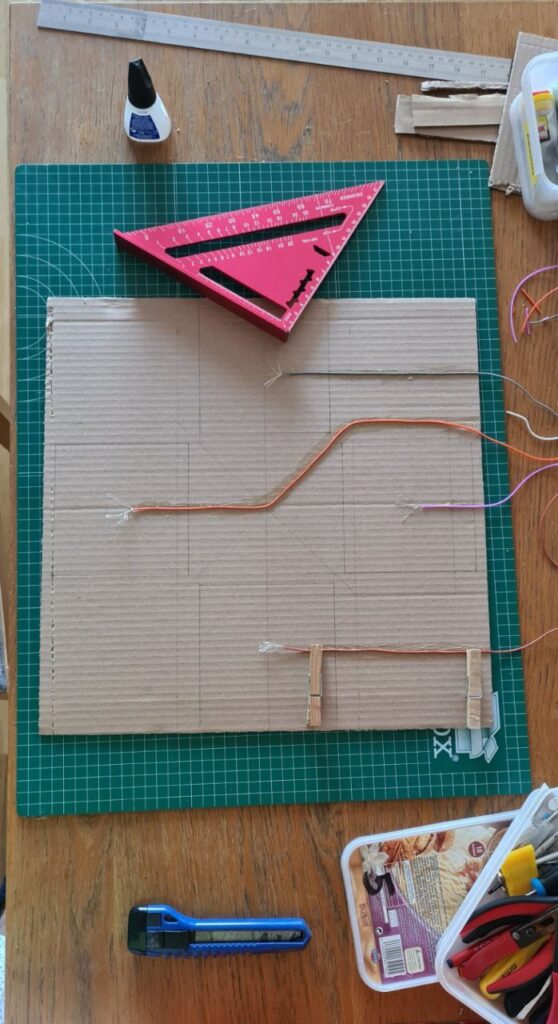


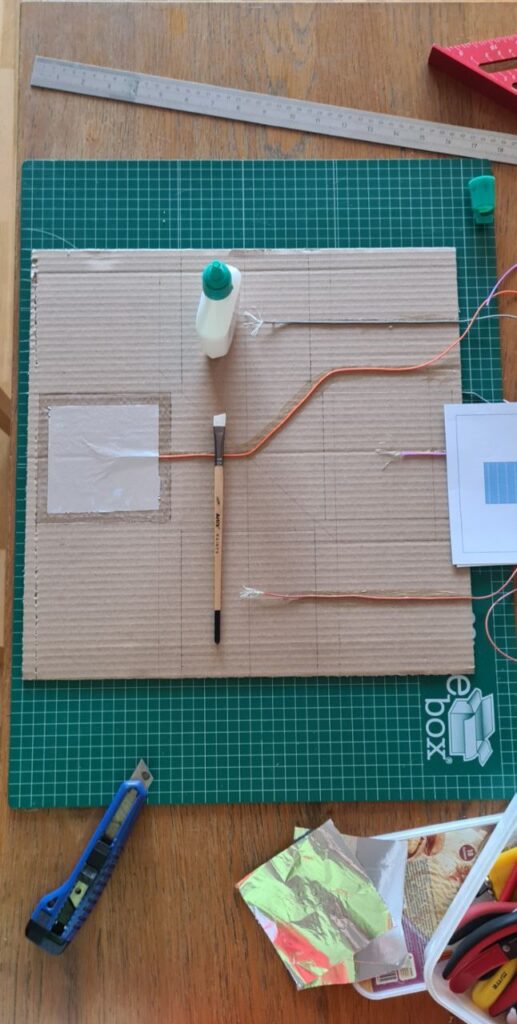

També podeu utilitzar petites bosses de plastic on s’hauran d’introduir el paper d’alumini, cable i dibuix.


Aqui teniu dos models de botons tàctils

Esquema
Al seguent esquema, donat que el programa de fer-los no disposa d’aquest tipus de botons tàctils, hem utilitzat aquests rectangles verds.
Les piles que apreixen a l’esquema s’han de substituit per una alimentació diferent, en el nostre cas una pila de liti.

Important. S’ha d’evitar, pels problemes que pot donar, el Touch Pin1 (GPI00)
Connexions i Muntatge
Per alimentar la caixeta amb la ESP32 s’ha utilitzat una pila de liti que, conforme a com està estructurat el dispositiu, es por carregar facilment.

- Connexió de botons a l’ESP32:
- Els botons es connecten als pins tàctils.
Touch pins escollits Touch0 (GPI04), Touch2 (GPI02), Touch3 (GPI015) i Touch4 (GPI013) - Els pins tàctils detectaran el toc i enviaran ordres a l’ESP32.
- Els botons es connecten als pins tàctils.
Emparellament ESP i Bluebot
L’emparellament i totes informacions més específiques les trobareu a la guia de creació: Link
Limitacions per a nens amb discapacitats funcionals
- Botons físics: Aquests botons, tot i ser accessibles, poden resultar difícils de pressionar per nens amb discapacitats motrius. A més, la mida dels botons i la precisió que es requereix per programar amb seqüències pot ser un repte.
- Accessibilitat: Per a nens que tenen limitacions funcionals a les mans, l’ús dels botons pot resultar complex, ja que la precisió o força per activar-los no sempre està a l’abast. És per això que la connexió amb botons tàctils externs, com està fent el nostre projecte amb la ESP32, proporciona una solució més adaptada a les necessitats de cada nen.
- Accions immediates: A diferència del sistema clàssic de funcionament del Bluebot, pensant en nens amb diversitat funcional, el nostre projecte està pensat perque quan es toqui un botó l’acció corresponent es posi en marxa immediatament i no es puguin acumular ordres.
Així mateix les ordres clàssiques de girar a esquerra/dreta s’han substituit per girar i avançar; de la mateixa manera els nens no veuran cap pictograma de girar, tan sols fletxes de direcció.
Avantatges dels botons capacitius
- Sensibilitat ajustable: Els botons capacitius permeten ajustar la sensibilitat, facilitant l’ús per a estudiants amb diferents nivells de mobilitat.
- Sense pressió mecànica: No requereixen pressió física, beneficiant estudiants amb limitacions de força o mobilitat a les mans.
- Durabilitat: Sense parts mòbils, són més resistents a l’ús intensiu i menys propensos a fallades mecàniques.
- Superfície plana: Facilita la neteja i desinfecció, important en entorns educatius compartits.
- Personalització: Es poden crear superfícies de diferents mides i formes, adaptant-se a necessitats específiques.
- Adaptacions per a diferents necessitats
- Superfícies ampliades: Crear botons grans utilitzant materials conductors sobre superfícies planes per a estudiants amb precisió motora limitada.
- Feedback multimodal: Combinar el toc capacitiu amb retroalimentació visual (LEDs) i auditiva per a una experiència més inclusiva.
- Ubicació flexible: Els botons capacitius poden col·locar-se en posicions ergonòmiques personalitzades per a cada estudiant.
- Sensibilitat variable: Programar diferents nivells de sensibilitat per adaptar-se a les capacitats individuals dels estudiants.
Consideracions de disseny
- Contrast visual: Utilitzar colors d’alt contrast i textures diferents per ajudar en la identificació tàctil i visual dels botons.
- Etiquetatge clar: Incloure símbols, text en relleu o Braille per a una fàcil identificació de les funcions dels botons.
- Protecció contra activacions accidentals: Implementar delays o confirmacios per evitar activacions no desitjades.
- Ergonomia: Dissenyar la disposició dels botons tenint en compte l’ergonomia i el rang de moviment dels usuaris.
Codi final
Tant el codi com les informacions més tècniques les podeu trobar a la guia de creació: link
Amb uns petits coneixements de programació es pot modificar el codi en funció de les necessitats específiques dels usuaris
Guia per a replicar el projecte: Control del Bluebot amb ESP32 i botons tàctils externs
Fase 1:
Preparació del material i coneixements previs
- Conèixer els components clau:
- Bluebot: Robot educatiu que es controla per Bluetooth.
- ESP32: Microcontrolador amb connectivitat Wi-Fi i Bluetooth, que serà utilitzat per connectar-se amb el Bluebot.
- Bluetooth Low Energy (BLE): Tecnologia de baix consum que es farà servir per a la comunicació sense fils entre l’ESP32 i el Bluebot.
- Pins tàctils de l’ESP32: Seran utilitzats per connectar botons tàctils externs. 2,4,15, 13, 12 i 14.
Reunir els materials necessaris:
- Bluebot.
- Placa ESP32.
- Botons tàctils Millor que siguin com el que mostrem al projecte (Low Cost)
- Ordinador amb el programari adequat per programar l’ESP32 ( Arduino IDE).
- Fonts d’alimentació per a l’ESP32 i el Bluebot (bateries o connexions USB).
Fase 2:
Instal·lació de programari i configuració de l’ESP32
- Instal·lar Arduino IDE:
- Descarregar i instal·lar el programari Arduino IDE des del lloc web oficial.
- Configurar l’ESP32 a Arduino IDE:
- Afegir la placa ESP32 a l’IDE:
- Obre l’IDE d’Arduino.
- Ves a Fitxer > Preferències i afegeix aquest URL al gestor de plaques:
https://dl.espressif.com/dl/package_esp32_index.json - Ves a Eines > Gestor de plaques i cerca “ESP32” per instal·lar-la.
- Afegir la placa ESP32 a l’IDE:
- Connectar l’ESP32 a l’ordinador:
- Connecta l’ESP32 a través d’un cable USB i selecciona la placa ESP32 des de Eines > Placa i el port corresponent.
Fase 3:
Configuració i connexions físiques
- Connexió de botons externs als pins tàctils de l’ESP32:
- Selecciona quins pins tàctils utilitzaràs per als botons. Els pins tàctils típics són:
- GPIO2
- GPI04 *
- GPIO15 *
- GPIO12 *
- GPIO13 *
- GPI014
- GPI027
- GPI033
- GPI032
- * pins emprats en el nostre exemple
- Connecta cada botó tàctil a un d’aquests pins.
- Selecciona quins pins tàctils utilitzaràs per als botons. Els pins tàctils típics són:
Fase 4:
Programació de l’ESP32
- Encén el Bluebot i fes una cerca de dispositius Bluetooth utilitzant l’ESP32. Recorda que perque es connecti al Bluetot cal que sigui el dispositiu que estigui més a prop de la placa.
- Així mateix, primer s’ha d’encendre el Bluebot, després la placa. Trigarà uns 30 segons en detectar tots el Bluetooth del voltant, escollirà el que tingui més a prop.
Fase 5:
Programació de l’ESP32 Botons tàctils, accions
Instalació del codi complet.
Provar els botons tàctils:
Si el sistema respon correctament, podràs veure els moviments del Bluebot.
Toca els botons tàctils per veure si l’ESP32 detecta les pulsacions i les accions programades s’executen (com moure el Bluebot endavant o cap als costats).
Adaptar el disseny dels botons tàctils:
- Considera utilitzar superfícies tàctils més grans o més sensibles segons les necessitats dels alumnes amb discapacitats funcionals.
Provar el sistema amb els alumnes:
- Organitza sessions pràctiques amb els alumnes per assegurar-te que poden utilitzar els botons tàctils amb facilitat.
- Ajusta el disseny i el programari segons les necessitats específiques de cada alumne.